登录
首页
关注
专题
工具箱
付费
博客
未来已来
更新:2020-03-05 20:12:04
AI智能算法
在机器人领域,让机器人保持站立并进行平稳的运动一直是一个棘手的挑战,因为这需要超高的专业知识和设计水平。尽管一些传统的机器人能在人工控制的情况下完成站立和运动,但它们的活动范围也充满了各种局限性。
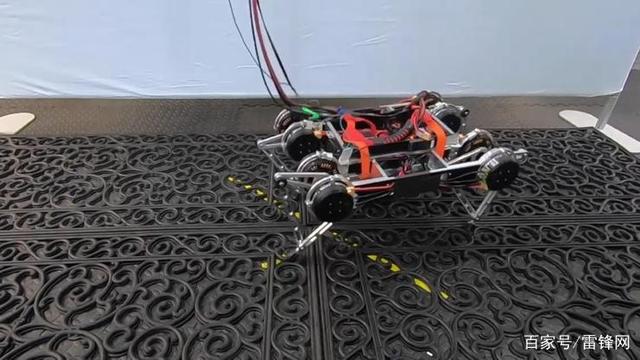
为了解决这个问题,Google 近日和佐治亚理工学院以及加州大学伯克利分校的研究人员联合发表了一篇论文,详细介绍了他们如何成功地构建了一个通过 AI 以自学走路的机器人。他们给这只四足小机器人起了个可爱的代号“Rainbow Dash”。
根据世界纪录,婴儿从爬行到学会行走的最快速度是 6 个月,而根据论文中的测试数据显示,Rainbow Dash 平均只需要大约 3.5 小时来学习向前、向后和左右转弯等运动——在坚硬平坦的地面上,该机器人学习走路需要 1.5 个小时,在由记忆海绵材质的床垫上大约需要 5.5 个小时,在镂空的地毯上大约需要 4.5 个小时。
具体来说,该机器人使用深度强化学习,即结合了深度学习和强化学习两种不同类型的 AI 技术。通过深度学习,系统可以处理和评估来自其身处环境的原始输入数据;通过强化学习,算法可以反复试验,以学习如何执行任务,并根据完成的程度来获得奖励和惩罚。也就是说,通过上述的这种方式,机器人便可以在其不了解环境中实现自动控制策略。
在以往的此类实验中,研究人员最初都会让机器人通过模拟来学习真实世界的环境。在仿真环境中,机器人的虚拟体首先与虚拟环境进行交互,然后,算法接收这些虚拟数据,直到系统有能力对这些数据“应对自如”,一个搭载系统的物理形态的机器人才会被放置到现实环境中进行实验。这种方法有助于避免在试错过程中对机器人及其周围环境造成损害。
举报
© 著作权归作者所有
喜欢 |
已喜欢 |
收录到我的专题 |
260
写了 607 字,被 人关注
关注
已关注
肯请大家积极发布健康文档,违法/广告/垃圾信息/请不要再发了!希望大家共同创作一个健康社区,感谢大家!
平台严格禁止发布违法/不实/欺诈等垃圾信息,一经发现将永久封禁帐号,针对违法信息将保留相关证据配合公安机关调查!
我知道了